قبل از شروع به بررسی این که موتور پله ای دقیقاً چه چیزی است، دست خود را دراز کنید و با نوک انگشتتان نوک بینی خود را لمس کنید. ساده است! این دفعه با چشم های بسته این کار را انجام دهید و میبینید که باز هم ساده است و مشکلی نیست، امکان ندارد از پسش بر نیایید. حتی در افراد دست و پا چلفتی مثل من، مغز بیشتر کنترل بدن را در دست دارد.
در ورزشکاران، هنرمندان، رقاصان باله و جراحان، “کنترل” به معنای دقت مطلق است. حال تصور کنید که قصد دارید با دنده ها، چرخ ها و اهرم ها رباتی بسازید که با همان دقت مکانیکی، کاری که بدن با ماهیچه و استخوان می کند را انجام دهد!
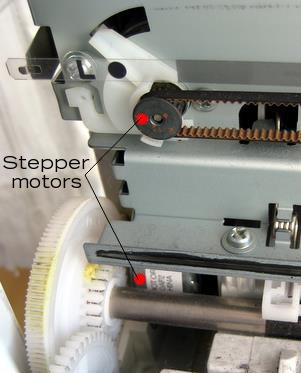
یکی از مشکلات بزرگ ساخت ربات های بی نقص این است که حرکت موتور های الکتریکی به طور دقیق امکان پذیر نیست. به همین دلیل است که بسیاری از ربات ها موتور های پله ای را به موتور های معمولی ترجیح می دهند، زیرا می توانند در زوایای کاملا از پیش تعریف شده تحت کنترل الکترونیکی دقیق بچرخند. آنها چه هستند و چگونه کار می کنند ؟ با من همراه باشید تا دقیق تر بررسی کنیم!
همچنین ببینید: معرفی شش نوع مختلف از ربات های ایستا
موتورهای الکتریکی معمولی چه اشکالی دارند؟ ( چرا موتور های الکتریکی معمولی مناسب نیستند)
یک موتور الکتریکی ساده بر اساس بخش کوچکی از علم مغناطیس که همه ما در مدرسه آموخته ایم ساخته شده است.
قطب های نا هم نام یکدیگر را جذب می کنند و قطب های هم نام دفع. نحوه ی کار یک موتور معمولی این گونه است که، یک آهن ربای حلقه ای شکل بگیرید و یک سیم پیچ را داخل آن قرار دهید سپس درون سیم جریان الکتریکی برقرار کنید. سیم به یک آهن ربای موقتی تبدیل میشود که از الکتریسیته تغذیه می کند- به عبارتی دیگر یک آهن ربای الکتریکی به حساب می آید- و میدان مغناطیسی ای که به وجود می آورد باعث دفع میدان دائمی ای می شود که آنرا احاطه کرده است.
با قطع و وصل کردن جریان به وسیله یک دستگاه کوچک هوشمند به نام کموتاتور، و برخی اتصالات الکتریکی به نام جاروبک، شما می توانید کاری کنید که سیم به طور نامحدود در همان مسیر بچرخد. برق منبع تغذیه ( انرژی الکتریکی ) را به آن وصل کنید و می بینید که حرکت (انرژی مکانیکی) را دریافت خواهید کرد.
این ماهیت یک موتور معمولی است که از جریان الکتریکی مستقیم (DC) استفاده می کند. اگر هنوز مطمئن نیستید که یک موتور مثل این چگونه کار می کند، توصیه می کنم مقاله ی مقدماتی درباره ی موتور های الکتریکی را بخوانید.

موتور های جریان متناوب (AC)
ما همچنین می توانیم موتور هایی بسازیم که به جای استفاده از جریان مستقیم از جریان متناوب استفاده کنند. هر چند آنها به طور کاملاً متفاوتی مهندسی شده اند اما همچنان براساس خاصیت مغناطیسیِ ” جذب قطب های ناهم نام و دفع قطب های هم نام” کار می کنند. الکتریسیته ای که موتور از آن تغذیه می کند، دافعه و جاذبه مغناطیسی می سازد و همچنین نیرویی بوجود می آورد که باعث چرخش موتور می شود.
با کمی مطالعه راجع به موتور های القایی جریان متناوب، بیشتر درمورد موتور های جریان متناوب – که موتور های القایی نیز نامیده می شوند – یاد خواهید گرفت. فرقی نمی کند که آنها با جریان مستقیم کار می کنند یا متناوب، موتور های معمولی بازو های الکتریکی ای هستند که به زندگی مدرن امروزی معنا بخشیده اند. شما می توانید کاربرد آنهارا در تمام اسباب و وسایل اطراف خود مشاهده کنید، از مخلوط کن ها و یخچال ها گرفته تا جاروبرقی و قطار های برقی.
اما در همه ی این ماشین ها، روتور های موتورها به طور مداوم درحال چرخش هستند. هنگامی که شما یک فرش را جارو میکشید یا برای رفتن سر کار از مترو استفاده می کنید، موتور هایی که برای شما کار میکنند به تعداد دلخواهی می چرخند. هیچ کنترل دقیقی بر تعداد دفعاتی که می چرخند یا با چه زاویه ای می چرخند وجود ندارد، هرچند که اهمیتی ندارد.
موضوع مرتبط: آموزش سیستم های راه اندازی موتور آسنکرون
چرا به موتور پله ای نیاز داریم؟
حالا فرض کنید که می خواهید با استفاده از نیروی الکتریکی یک بازوی ربات بسازید که با یک زاویه ی مشخص می چرخد (تعداد درجه ی مشخصی) و بتواند با موفقیت یک فنجان قهوه را از روی میز شما بردارد. شما می توانستید برای این کار یک موتور الکتریکی را بر روی یک اهرم چوبی یا پلاستیکی نصب کنید و با اتصال برق باعث چرخش آن بشوید و با کم و زیاد کرد جریان برق و قدرت ورودی حرکت آن را در زوایای مشخصی کنترل کنید. اما مشکل اینجاست که هیچ راهی برای دانستن اینکه موتور (یا بازو) در چه زاویه ای حرکت می کند وجود ندارد. این کار به خیلی چیز ها بستگی دارد، از قدرت موتور و جریان برق گرفته تا وزن بازو و حتی جهت وزش باد.
موتوری که به این صورت باشد و کنترلی بر تعداد دفعات حرکت آن نباشد، هیچ جایی در صنعت رباتیک ندارد، چرا که مطمئنا قهوه ی شما بر روزی زمین خواهد ریخت! و اینجا زمانی است که یک موتور پله ای وارد عمل می شود، این موتور یک نوع خاص از موتور های جریان مستقیم است که به شیوه ای طراحی شده تا شما بتوانید با زاویه دلخواه آنرا حرکت دهید به جای اینکه با زاویه دلخواه و غیر قابل کنترل بچرخد.
موتور پله ای دقیقا چه چیزی است ؟
موتور های پله ای حداقل چهار تفاوت عمده با موتور های جریان مستقیم معمولی دارند:
تفاوت اول
اولین تفاوتی که شما متوجه آن خواهید شد این است که آنها جاروبک یا کموتاتور ندارند ( بخشی از یک موتور DC که جریان الکتریکی را معکوس می کند و روتور را حفظ می کند). بخش چرخان یک موتور پله ای به طور مداوم در همان جهت می چرخد. به عبارتی دیگر، موتور های پله ای نمونه ای از چیزی هستند که ما آنهارا موتور های بدون جاروبک میدانیم. همچنین شما می توانید موتور های بدون جاروبک را در وسایل الکتریکی بسیار زیادی پیدا کنید، برای مثال در توپی چرخ ها کار گذاشته شده اند که به آن موتور های توپی می گویند.
تفاوت دوم
دومین تفاوت عمده در چیزی است که می چرخد، اگر به یاد داشته باشید، در یک موتور DC ساده، یک یا چند آهن ربای دائمی خارجی وجود دارد که ثابت می مانند و به عنوان روتور شناخته می شود. و همچنین یک یا چند سیم پیچ داخلی وجود دارد که درون آن می چرخد و همان روتور نامیده می شود. در یک موتور توپی بدون جاروبک، سیم پیچ ها در مرکز ثابت هستند و آهن ربا های دائمی در خارج بدور آنها میچرخند. یک موتور پله ای باز متفاوت است، این دفعه آهن رباهای دائمی داخل هستند و می چرخند (که همان روتور را تشکیل می دهند) در حالی که سیم پیچ ها در خارج ثابت هستند (که همان استاتور را تشکیل می دهند).
تفاوت سوم
سومین تفاوت بزرگ بین یک موتور DC معمولی و یک موتور پله ای در طراحی استاتور و روتور است. که به جای یک آهن ربای بزرگ در بیرون ( استاتور) و یک سیم پیچ بزرگ در داخل آن (روتور)، یک موتور پله ای از یک آهن ربای داخلی که به طور موثری به بخش های جداگانه تقسیم شده است استفاده می کند به طوری که شبیه یک چرخ دنده است. حلقه های خارجی نیز دارای دندانه های متناظر هستند که ایمپالس های مغناطیسی، جذب، دفع و امکان چرخش دنده های داخلی را فراهم می کند. با دیدن تصاویر درک بهتری از مطلب خواهیم داشت.
تفاوت چهارم
تفاوت نهایی این است که یک موتور پله ای می تواند در یک موقعیت خاص، با یک زاویه مشخص، بی حرکت بماند. این مسئله بسیار مهم است اگر بخواهید موتور چیزی مانند بازوی یک ربات را بسازید، زیرا ممکن است لازم باشد مقداری مشخص بچرخد و دقیقا در همان نقطه بماند درحالی که بخش دیگری از ربات کار دیگری را انجام می دهد. این ویژگی گاهی اوقات گشتاور نگهدارنده نامیده می شود. گشتاور نیروی چرخشی است که یک جسم دارد، بنابراین “گشتاور نگهدارنده” به طور ساده به این معنای توانای موتور پله ای برای ثابت ماندن است.
یک موتور پله ای چگونه کار می کند؟
ساختار پایه
من می خواهم موتور پله ای را ساده سازی کنم و ایده ی اصلی آنرا به شما نشان دهم. روتور (بخشی داخلی) یک موتور با مقادیری گسسته و کوچک می چرخد زیرا استاتور (بخش خارجی) پالس های مغناطیسی ای را میفرستد که آنرا عقب و جلو می کند.
روتور
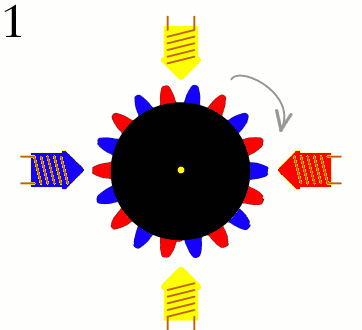
خود روتور از دو صفحه ( دیسک) ساخته شده است که کمی شبیه دنده ها هستند، یکی از آنها قطب مغناطیسی شمالی است ( رنگ قرمز) و دیگری قطب جنوبی ( رنگ آبی) است. هنگامی که این دو دیسک را پشت به پشت هم قرار می دهیم، دندانه های قطب شمال و جنوب به صورت یکی در میان در اطراف لبه قرار می گیرند. اگر تصور آن برایتان سخت است، فرض کنید دست چپ شما قطب شمال یک آهنرباست و رنگ آن قرمز است، درحالی که دست راست شما قطب جنوب یک آهنرباست و رنگ آن آبی است.
اگر یک دستتان را روی دست دیگر قرار دهید می بینید که انگشتان یک دست با دست دیگر متناوب هستند، حالا اگر پایین را نگاه کنید می بینید که دندانه های قطب شمال و قطب جنوب به صورت یکی در میان د اطراف لبه قرار گرفته اند. این دقیقا همان چیزی است که ما به طور موثر در روتور یک موتور پله ای داریم.
استاتور
در اطراف لبه روتور، استاتور قرار دارد؛ در این مثال، ما چهار آهنربای الکتریکی داریم که می توان آنهارا به طور جداگانه روشن و خاموش کرد، عموما آهن رباهای الکتریکی در یک موتور پله ای به صورت جفتی کار میکنند، با روشن کردن یک جفت آهن ربا که رو به روی هم قرار گرفته اند، قطب شمال شکل می گیرد، به دلیل وجود آهن رباهای سمت راست که هچنین آنها هم، باهم کار می کنند.
من ترجیح میدم این بخش رو با یک روش دیگه که فکر می کنم فهمیدن آن برایتان آسان تر است هم توضیح بدهم، اینکه دقیقا چه چیزی در چه زمان فعال شود، بستگی به این دارد که چه تعداد دندانه روتور وجود دارد و توسط چند سیم پیچ الکترومغناطیسی احاطه شده اند. تمام قطعات یک موتور پله ای باید به طور بی نقص مهندسی و جایگذاری شده باشند که موتور بتواند کار کند.
موتور پله ای چگونه می چرخد؟
1 – آهن ربای سمت راست انرژی می گیرد و به قطب شمال (رنگ قرمز) تبدیل می شود و آهن ربای سمت چپ به قطب جنوب (رنگ آبی) تبدیل می شود. این امر باعث میشود که روتور یک پله بچرخد و در نتیجه دندانه ی آبی روتور چفت آهن ربای مغناطیسی سمت راستی می شود و دندانه ی قرمز چفت آهن ربای مغناطیسی سمت چپ می شود.
2- اکنون آهن ربای پایینی به قطب شمال، و آهن ربای بالایی به قطب جنوب تبدیل می شود. دو آهنربای افقی خاموش می شوند و دوباره دندانه ی روتور یک پله می چرخد.
3- آهن رباهای عمودی الان خاموش شده اند و آهن رباهای افقی دوباره روشن شده اند اما با قطبیت مخالف ( الگوی مغناطیسی) که قبلا داشته اند و دندانه ی روتور یک پله دیگر پیش روی می کند.
4- در آخر، آهن رباهای با قطبیتی مخالف نسبت به دفعه ی قبل روشن می شوند و آهن رباهای افقی خاموش می شوند. روتور پله ی آخر را هم می چرخد و دوباره چرخه از اول تکرار می شود.
به یاد داشته باشید که یک موتور پله ای برای این که به طور مداوم و نامحدود پچرخد طراحی نشده است، با فرستادن تعداد ایمپالس های مورد نیاز به آهن رباهای الکتریکی خارجی، روتور به همان اندازه ی نیاز ما و با زاویه ای از پیش تعیین شده میچرخد. همچنین ما می توانیم با بر عکس کردن جریان برق آنرا در جهت مخالف بچرخانیم.
همچنین توصیه می کنیم بخوانید: دانلود کتاب PDF آموزشی در مورد انواع الکتروموتور ها
انواع موتور های پله ای
این فقط یک مرور ساده بر موتور های پله ای است و قرار نیست من جزئیات موتور های متعددی که وجود دارد را بررسی کنم. فقط دو اصطلاح تکنیکی و تخصصی که دانستن ان واجب است و ارزش یادگیری بالایی دارد را بدون هیچ توضیح اضافی ای به شما یاد می دهم.
قطب ها
موتوری که اینجا نمایش داده ام یک روتور آهنربایی دارد که به قطب های شمالی و جنوبی بسیاری تقسیم شده است، این نوع ساختار به عنوان موتور چند هسته شناخته می شود. هرچه تعداد هسته بیشتر باشد، فاصله ی هرپله ای که موتور می تواند بچرخد کمتر میشود و به همین نسبت با دقت بیشتری می توان آنرا کنترل کرد.
فاز ها
در یک موتور، “فاز” معمولا به معنای یک یا دو آهنربای الکتریکی است که مقابل هم قرار گرفته اند و به طور متناوب (بدون هماهنگی با یکدیگر) کار می کنند. موتوری که در بالا نشان داده ام دو فاز دارد (یعنی دو جفت آهن ربای الکتریکی که در مجموع چهار آهن ربا هستند که با زوایای نود درجه تنظیم شده اند).

در یک موتور پله ای سه فازی، شما ممکن است سه آهنربای الکتریکی داشته باشید که با زاویه ی 120 درجه تنظیم شده اند. البته یک موتور سه فازی می تواند سه جفت داشته باشد که به صورت 60 درجه ای تنظیم شده باشند. یک موتور چهار فازی هشت آهنربای الکتریکی دارد که در چهار جفت تنظیم شده اند که هر کدام با زاویه ای 46 درجه ای از یکدیگر جدا شده اند.
مزایا و معایب استفاده از موتور های پله ای
دلیل استفاده از یک موتور پله ای در دست داشتن کنترل دقیق است، شما می توانید طبق یک زاویه ی از پیش تعیین شده باعث حرکت موتور شوید. اما معایبی نیز وجود دارد، موتور های پله ای گاهی اوقات می توانند بسیار نا منظم باشند، زیرا آنها هر پله را با ایمپالس هایی ناگهانی شروع یا متوقف می کنند، که اگر در تلاش برای ساخت یک دستگاه دقیق باشید چیزی نیست که شما بخواهید.
یک جایگزین برای موتور های پله ای، استفاده از موتور سرو (خودفرمان) است، موتوری که قابلت تنظیم خودکار دارد. به طور معمول، یک موتور سرو (خودفرمان) دارای یک کدگذار لیزری است که به روتور آن متصل شده است. به زبان ساده این یک صفحه سیاه و سفید الگوگذاری شده است که در مقابل چیزی شبیه یک سلول فتوالکتریک حرکت می کند.
هنگامی که صفحه می چرخد، سلول الگوی سیاه و سفید را تشخیص می دهد و یک مدار الکترونیکی متوجه مقدار دقیق چرخش صفحه می شود. با استفاده از این ویژگی، موتور می تواند به درستی و دقیق تر از یک موتور پله ای معمولی کنترل شود. موتور های سرو (خود فرمان) طراحی بسیار پیچیده تری نسبت به موتور های پله ای دارند، از همین رو قیمت بالاتری دارند که این امر باعث می شود اغلب از موتور های پله ای استفاده شود.
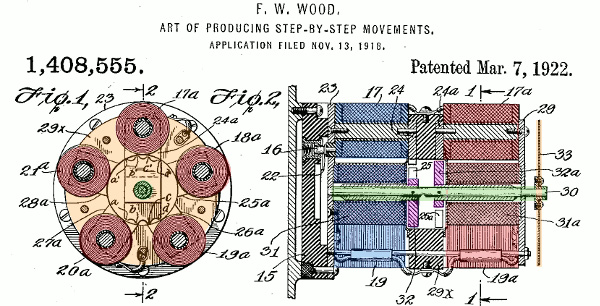
چه کسی موتور های پله ای را اختراع کرد ؟
به نظر من، فرانک وود این موتور ها را در چند اختراع ثبت شده بین سال های 1912 و 1918 اختراع کرده است، در اینجا طرحی از یک اختراع ثبت شده ی وی در تاریخ 7 مارس 1922 با عنوان “حرکت پله به پله” را می بینید، که از یک حلقه خارجی با پنج آهن ربا برای ساختن یک جفت آهن ربای داخلی و یک میله گردان. به گفته ی خود وود، دستگاه او حرکات پله به پله را به یک عنصر چرخان تبدیل می کند که تسوط ویژگی های قطبی بودن یک مدار مغناطیسی این امر ممکن می شود.


هیچ دیدگاهی نوشته نشده است.