امروزه، هوش مصنوعی و رباتیک بدون شک دو زمینه مطالعاتی ای هستند که زندگی آینده انسان ها را رقم خواهند زد. از یک طرف، ما دستگاه های فوق مدرنی داریم که تقریبا هر کاری را می توانند با کیفیت بالا انجام دهند، و از طرف دیگر هوش مصنوعی ای داریم که به معنای واقعی کلمه در حال متحول کردن همه ی روش هایی است که ما بیشتر کارهای عملی مان را با آنها انجام می دهیم.
امروز در این مقاله می خواهیم در مورد آن دستگاه های مدرن و یا ربات ها صحبت کنیم. اساسا ربات ها به دو دسته بندی کلی تقسیم می شوند؛ اولین دسته بندی بر اساس کاربردشان و دومی بر اساس سینماتیک یا حرکتشان. در این مقاله انواع مختلف آنها را فقط بر اساس سینماتیک معرفی می کنیم. بر اساس حرکت شناسی، ربات ها تقسیمات خیلی بیشتری پیدا می کنند که در این مقاله فقط به انواع اصلی آنها اشاره می کنیم.

1 – ربات های دکارتی
ربات های دکارتی احتمالاً معمول ترین نوع رباتی است که هم در صنعت و هم در تجارت از آن استفاده می شود. این ربات ها که گاهی با نام ربات های زیردریایی نیز شناخته می شوند، به طور عمده در سه محور خطی حرکت می کنند. یعنی فقط می توانند در خطوط مستقیم حرکت کنند و در زوایای مشخصی از یکدیگر قرار می گیرند. آرایش مکانیکی ربات های دکارتی خیلی ساده تر از اکثر ربات های ایستای دیگر است.
2 – ربات های استوانه ای
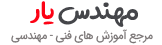
روباتهای استوانه ای به طور کلی برای مونتاژ، جوش نقطه ای و ریخته گری ماشین استفاده می شوند. اگرچه این نوع ربات ها امروزه کمیاب شده اند، ولی هنوز هم می توانند مفید باشند. همانطور که از نام آن پیداست، این ربات یک سیستم با مختصات استوانه ای تشکیل می دهد.
همانطور که در تصویر بالا می بینید، یک ربات استوانه ای سه محور حرکتی دارد. اولی محور Z که حول آن به صورت عمودی می چرخد و بعدی محور Y که به صورت خطی در مسیر آن حرکت می کند. این ربات های استوانه ای گاهی اشتباها با ربات های اسکارا اشتباه گرفته می شوند و برعکس.
اگرچه طرز کار آنها خیلی شبیه به هم است اما ساختارشان و کاربرد آنها کاملاً با هم متفاوت است. برای مدلسازی انواع ربات ها می توانید از نرم افزار سالیدورک ستفاده نمایید.
3 – ربات های اسکارا
برای کار مونتاژ در سراسر دنیا معمولاً بیشتر از بازوی ربات اسکارا استفاده می شود، به دلیل نصب آسان و بدون محدودیت آن.
در ربات های اسکارا یک موتور پایه وجود دارد که باید همه ی موتور های نصب شده ی دیگر را حمل کند. یکی از ضعف های این نوع ربات ها این است که شدیدا گران هستند، در مقایسه با ربات های دکارتیِ ارزان قیمت و دیگر اینکه برای اجرا نیاز به نرم افزار های پیچیده و سطح بالا دارند.

4 – ربات های موازی
یکی از بهترین مثال های این نوع ربات شبیه ساز هواپیماست، که توسط خلبانان نظامی و تجاری مورد استفاده قرار می گیرد تا توانایی های پرواز خود را با شبیه سازی شرایط زندگی واقعی افزایش دهند.
واژه موازی در اینجا نباید چنین سوء برداشت شود چرا که این واژه به یک تنظیم هندسی اشاره نمی کند، بلکه به یک ویژگی منحصر به فرد از این نوع ربات در علم کامپیوتر اشاره می کند. در اینجا کلمه موازی به این معنی است که نقطه پایان هر یک از اتصالات کاملا متفاوت از دیگران است.
ربات های موازی مخصوصا به گونه ای طراحی شده اند که بتوانند سفت و سخت باقی بمانند و در برابر همه ی حرکت ها و اختلالات ناخواسته مقاومت کنند، که از این نظر مخالف ربات های سریالی هستند. اگرچه هر فعال کننده با یک درجه آزادی کار می کند ولی در نهایت انعطاف پذیری آنها توسط فعال کننده های دیگر محدود می شود. این سفتی و سختی آنهاست که ربات های موازی را از سریالی جدا می کند.

5 – ربات های مفصلی
هنگامی که صحبت از ربات های صنعتی می شود، در بیشتر مواقع منظور ربات های مفصلی است. این ربات ها تقریباً همه کاره اند و کاملاً مناسب کار های صنعتی اند، برخلاف بیشتر ربات هایی که قبل از این معرفی کردیم. این چابکی و تطبیق پذیری به خاطر محور های اضافه آنهاست، که معمولاً از 4 تا 6 محور دارند اما می توانند تا 10 محور هم داشته باشند. کاربرد اصلی آنها در مدیریت مواد، جوشکاری، توزیع و … است.
برای تحلیل حرکتی این نوع ربات ها معمولاً از قسمت پیشرفته نرم افزار سالیدورک یا کتیا استفاده می گردد.

6 – ربات های کروی
بر اساس سطح پیچیدگی، ربات های کروی جایی بین ربات های دکارتی یا استوانه ای و ربات های فوق پیچیده قرار می گیرند. اساساً، یک ربات کروی ربات سایز متوسطی است که درون یک توپ کروی قرار گرفته است، که این توپ با کمک IDU (واحد رانش داخلی) حرکت می کند. این ربات های کروی متحرک به شدت مناسب مأموریت های مانیتورینگ و نظارت هستند و می توانند زیر آب هم مورد استفاده قرار بگیرند.


هیچ دیدگاهی نوشته نشده است.