
این نوشته از بخش وبلاگ مهندس یار را به پهپاد و کواد کوپتر اختصاص داده ایم. در دنیای اطراف ما تکنولوژی با سرعتی سرسام آور رو به جلو در حال پیشرفت کردن بوده و همپای آن جلو رفتن عملا کاری غیر ممکن شده است. این مسئله باعث شده تا هر کس، به زمینه مورد علاقه خود پرداخته و پیشروی آن را لحظه به لحظه دنبال کند. یکی از موضوعات حیطه تکنولوژی و مهندسی برق و مکانیک، مبحث پهپاد و کواد کوپتر می باشد. البته پهپاد مقوله ای چندان جدید نیست و اولین پهپاد های تولیدی در دهه 50 قرن 19 ام میلادی (1850) ساخته شدند. اما چیزی که امروزه ما به عنوان پهپاد می شناسیم در اواخر دهه 30 قرن بیستم میلادی شروع به شکل گرفتن کرده و مهندسان زیادی را از آن زمان به خود مجذوب کرده است.
پهپاد و کوادکوپتر
امروزه کواد کوپتر ها و پهپاد ها انواع مختلف و متفاوتی داشته و در کاربرد های وسیعی استفاده می شوند. استفاده به عنوان اسباب بازی، وسیله فیلم برداری، استفاده نظامی، استفاده به عنوان وسیله نمایشی جمعی، تاکسی هوایی، ارسال بسته، استفاده توسط آتش نشانان و به طور کلی هر جایی که نیاز به انجام کاری هوابرد، بدون حضور فیزیکی انسان داشته باشیم، این وسیله ها به کمک ما خواهند آمد.
در ادامه این مقاله به طور مختصر ابتدا به بررسی پهپاد ها و اصول عملکرد آنها، و سپس به بررسی کواد کوپتر ها و اصول عملکردی آن ها پرداخته و طرح ساده ای از کواد کوپتر ها برای علاقه مند کردن شما به ساخت آنها ارائه می کنیم.
پهپاد (پرنده هدایت پذیر از دور):

پهپاد در زبان فارسی مخفف عبارت پرنده هدایت پذیر از دور بوده و بر اساس این تعریف به هر نوع جسم پروازی کنترل شونده از راه دور گفته می شود. با این حال در گفت و گو های روزمره کواد کوپتر ها به دلیل مکانیسم عملکرد متفاوت از این دسته جدا بوده و به همین دلیل در بخش بعدی به آن ها خواهیم پرداخت.
پهپاد همان طور که بیان شد پرنده ای پروازی در شکل و شمایل هواپیمایی کوچک می باشد. این هواپیماهای بدون سر نشین، در ابعاد کوچک و بزرگ وجود داشته و جدای از استفاده هایی که در زمینه سرگرمی دارند. در 3 دسته مهم بیشترین کاربرد را از خود نشان داده اند:
- استفاده نظامی: مهم ترین کاربرد این پرنده ها در دنیای امروزی در صنایع نظامی، به منظور کنترل مرز ها، انتقال بسته به سربازان و انجام حملات از راه دور بوده و سرمایه زیادی در این زمینه صرف می شود. پهپاد ها به قدری در زمینه نظامی اهمیت پیدا کرده اند که در ساختار دفاعی هر کشوری، شاخه ای مخصوص به آنها، در جهت تولید و توسعه پهپاد ها تعبیه شده است.

- استفاده در مسائل زمین شناسی و هواشناسی: از دیگر کاربرد های وسیع این پهپاد ها، نقشه برداری از روی سطح زمین، در محل هایی که حضور انسان ممکن نبوده و یا بسیار خطرناک می باشد، است. این پرنده ها به وسیله سنسور های مخصوص خود از روی سطح زمین نقشه سه بعدی تهیه کرده و تسلط بر محل های ناشناخته را برای ما ممکن می کنند. دیگر کاربردی که همین پهپاد ها دارند، کمک به پیش بینی طوفان ها و وضعیت جوی بوده که با روی کار آمدن آنها، کمی از پیچیدگی پروسه این مقوله کاسته شده است.

- استفاده در موارد مربوط به آتش نشانی و نجات جان مردم: با اینکه استفاده نظامی پر کاربرد ترین استفاده این دستگاه ها می باشد، اما در سال های اخیر، پهپاد ها توانسته اند شایستگی خود را در خاموش کردن آتش ها جنگلی و در مناطق صعب العبور، ارسال بسته های پزشکی و غذایی به مناطق محروم و یا حتی کوهنورد هایی که در مناطق دور از دسترس گیر افتاده و یا آسیب دیده اند، ثابت کنند.

قطعات اصلی پهپاد

قطعات اصلی تشکیل دهنده یک پهپاد شامل موتور پیشران، موتور های کنترل باله ها، سنسور تعادل، بدنه ایرودینامیکی، گیرنده و فرستنده رادیویی و یک کنترل برای هدایت آنها می باشد.
اما عملکرد این پهپاد ها چگونه است؟ عملکرد یک پهپاد به نسبت یک کواد کوپتر ساده تر بوده و پیچیدگی بسیار کمتری دارد، با این حال نمی توان دانش مورد نیاز برای ساخت آن ها را ندید گرفت. قسمت اصلی یک پهپاد موتور پیشران آن است. درست مانند ملخ های یک هواپیمای قدیمی (البته پهپاد های نظامی جدید از موتور های جت پیشرفته استفاده می کنند) نیروی پیشران این پهپاد ها نیز به وسیله چرخش یک ملخ، که وابسته به دستور دریافتی از کنترل هدایتی از روی زمین بوده و سرعت چرخشش را هدایت کننده تعیین می کند، تامین می شود.
به دلیل جثه کوچکی که اکثر این پرنده ها دارند، باد و سرعت آن بر روی آنها تاثیر زیادی داشته و از همین نظر نیازمند ماژول ها و سنسور هایی برای حفظ تعادل هستند. این سنسور ها در صورت تشخیص عدم ثبات، با کنترل کردن باله های هدایتی تعادل هواپیمای کنترل از راه دور ما را حفظ می کنند. البته موتور هایی که باله های کنترلی را مدیریت می کنند، توسط سیگنال رادیویی دریافتی نیز برای بالا و پایین بردن، چرخیدن و دور زدن نیز استفاده شده و خرابی آنها می تواند منجر به سقوط و از بین رفتن پهپاد ما شود.
مهم ترین بخش پهپاد
اما با همه ی این اوصاف، مهم ترین بخش یک پهپاد، قسمت کنترلی آن می باشد، که شامل گیرنده و فرستنده رادیویی، سنسور های مورد نیاز دیگر ( مانند سنسور ارتفاع و سرعت ) مدار های کنترلی باله ها و موتور و به طور کلی تمامی قطعاتی که به عنوان مغز یک پرنده فعالیت می کند می باشد.
همانطور که بیان شد، پهپاد ها حاصل دستاورد مهندسی برق و مهندسی مکانیک بوده، و قسمت کنترل و هدایت آن را مهندسین برق بر عهده داشته و طراحی بدنه و باله های آن برای پرواز با ثبات و آسان را مهندسین مکانیک بر عهده گرفته اند.
با توجه به موارد گفته شده، تا اینجا می بایست دیدی کلی از چگونگی عملکرد این پهپاد ها پیدا کرده باشید. البته لازم به ذکر است که ساخت چنین وسیله ای نیازمند دانش تخصصی بالایی می باشد. برای درک این موضوع، کافی است به مداری برای کنترل هوشمند سرعت حرکت یک آرمیچر فکر کنید. چنین مداری نیازمند یک پردازنده مرکزی بوده و پروژه به نسبت سخت حتی برای مهندسین برق تازه کار می باشد!
کواد کوپتر:

کوادکوپتر به دلیل شرایط پروازی آسان تر و همینطور کاربرد های عمومی بیشتر از محبوبیت نسبتاً زیاد تری نسبت به پهپاد ها برخوردار بوده و همین مسئله سبب پرداختن علاقه مندان به توسعه بیشتر آنها شده است. کلمه کوادکوپتر به پرنده دارای چهار ملخ پروازی که توانایی پرواز ایستایی و عمودی را داشته باشد القا می شود.
کوادکوپتر ها در ابعاد مختلفی ساخته شده و جای توسعه فراوانی دارند. به طوری که شما در بازار می توانید کواد کوپتری کوچک تر از تلفن همراه خود خریده و یا سوار یکی از آنها در قالب تاکسی هوایی با قابلیت حمل چند مسافر شوید.
کاربردهای کوادکوپتر
بر خلاف پهپاد که محدوده کاربردی آن به نسبت محدود بود، کواد کوپتر این ویژگی را نداشته و در بازه وسیعی از کاربرد ها قرار می گیرد، به گونه ای که نمی توان دسته بندی مشخصی برای آن ارائه کرد. با این حال برخی از کاربرد های محبوب این پرنده ها به طور خلاصه در ادامه آورده شده است:
- استفاده در زمینه فیلم برداری و عکس برداری شخصی: امروزه کواد کوپتر هایی با ابعاد بسیار کوچک ساخته شده و به تولید انبوه رسیده اند که شما می توانید آن ها را به وسیله تلفن همراه خود کنترل کرده و برای فیلم برداری شخصی استفاده کنید.

- تحویل بسته: شرکت های بزرگی مانند آمازون در برخی از مناطق زمین سرویس تحویل بسته هوایی خود را فعال کرده و پس از ثبت سفارش شما و پردازش توسط آمازون، یک کواد کوپتر بسته شما را دم درب خانه به شما تحویل خواهد داد.

- مانیتورینگ و بررسی پروسه های مختلف مانند ساختمان های بلند که دسترسی به برخی از قسمت های آنها سخت است، همچنین عیب یابی و در مواردی حتی انجام برخی از تعمیرات مورد نیاز.

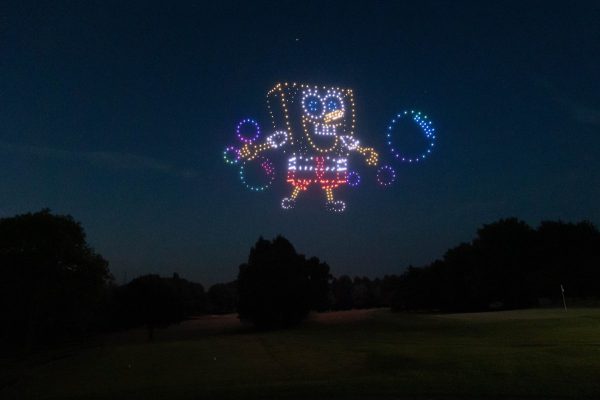
- سرگرمی و نمایش جمعی: محبوبیت کواد کوپتر ها در این زمینه به حدی رشد داشته است که می توان گفت در آینده ای نزدیک این دستگاه ها می توانند جای وسایل آتش بازی را گرفته به انتخاب برتر افراد در نمایش های هوایی شوند. در حال حاضر شرکت های زیادی بر این موضوع فعالیت می کنند. به گونه ای که در مواردی از صد ها کواد کوپتر برای نمایش اشکال مختلف در آسمان شب استفاده شده است.

قسمت های مختلف کوادکوپتر
اما، مهم تر از این موارد، بررسی قسمت های مختلف این تکنولوژی جذاب می باشد.
یک کواد کوپتر از چند بخش اصلی و مهم تشکیل شده است که به بررسی مختصر هر کدام می پردازیم:
- موتور ها: موتور های مورد استفاده از کواد کوپتر ها مخصوص بوده و در گفتار عامیانه به آنها براشلس گفته می شود (به طور دقیق تر موتور هایی که سرعت چرخش بسیار بالا، مصرف انرژی بهینه و ضریب پاسخ دهی بسیار بالایی دارند). این موتور ها در رده موتور های الکتریکی گران قیمت قرار گرفته اما با این حال به راحتی در دسترس و قابل تهیه می باشند.
- پردازنده مرکزی: پردازنده مرکزی یک کواد کوپتر هر نوع پردازنده ای می تواند باشد، از پردازنده های بر پایه معماری AVR گرفته تا برد های رزبری پای و پردازنده های ARM. با این حال محبوب ترین این پردازنده ها برای تولید کواد کوپتر ها میکرو پردازنده ATMega32، به دلیل ارزانی و توانایی پردازش بالا می باشد. پردازنده های AVR بر روی برد های آردوینو بسیاری وجود داشته که همین مسئله، به همراه امکانات آردوینو، سبب محبوبیت روز افزون آنها شده است.
- بدنه: بدنه یک کواد کوپتر از قسمت های بسیار مهم آن می باشد، چراکه بر خلاف یک پهپهاد، وزن یک کواد کوپتر می بایست دقیقا در وسط پروانه های آن قرار گرفته و تعادل کامل داشته باشد، در غیر این صورت به یک یا تعدادی از موتور ها فشار آمده و عملکرد کواد کوپتر را مختل می کند.
- سنسور ها: سنسور های مختلفی در یک کواد کوپتر استفاده می شوند، اما مهم ترین آنها سنسور تعادل (Gyroscope)، سنسور ارتفاع (برای جلوگیری از برخورد به زمین)، سنسور نزدیکی و… دیگر سنسور های قابل تعبیه برای عملکرد بهتر کواد کوپتر
- مدار کنترلی: با اینکه بخش اعظمی از کنترل سیستم پروازی یک کواد کوپتر توسط پردازنده آن انجام می پذیرد، اما برخی از قسمت های آن بالاجبار می بایست توسط قطعات آنالوگ کنترل شوند، چراکه تحت هر شرایطی سرعت پردازش و پاسخ دهی این نوع مدار ها از مدار های دیجیتالی بالا تر است. از قسمت هایی که به این صورت کنترل می شوند می تواند به پایه های محافظ ( که در مواقع سقوط جلوی خرابی کواد کوپتر را می گیرند ) اشاره کرد.
- فرستنده و گیرنده رادیویی: کواد کوپتر ها و به طور کلی پهپاد ها توسط امواج رادیویی کنترل شده و دستورات ارسالی از طریق کنترل هدایت گر بر روی این موج ها سوار می شوند. این فرستنده ها معمولا فرستنده های RF آماده که به صورت ماژولی در بازار موجود می باشند بوده و سرعت و دقت عملکرد قابل قبولی دارند.
عملکرد و کنترل کوادکوپتر
حال بیایید باهم به بررسی کمی دقیق تر کواد کوپتر ها بپردازیم.

همانطور که بیان کردیم این دستگاه ها دارای چهار عدد موتور سرعت بالا و با ضریب پاسخ دهی بالا هستند. قسمتی که بیشترین ارتباط را با این موتور ها به صورت غیر مستقیم دارد، سنسور تعادل است! در یک کواد کوپتر برای اینکه پروازی نرم داشته باشیم، نیاز است هر 4 موتور با سرعتی برابر با یک دیگر به منظور حرکت عمودی و پرواز ایستایی آن حرکت کنند. اما مسائل مختلفی نظیر باد می تواند در این مسئله اختلال ایجاد کند. در اینجاست که نقش سنسور ها و پردازنده مشخص می شود.
سنسور تعادلی داده های خود را به صورت مرتب و با نرخ فرکانسی بالا ( معمولا هماهنگ با فرکانس پردازنده )، برای پردازنده ارسال کرده و پردازنده با توجه به آن داده ها هر جا که متوجه شود انحرافی به وجود آمده، با کم یا زیاد کردن سرعت چرخش موتور ها در کسری از ثانیه و برای بازه ای از رده میلی ثانیه انحراف کواد کوپتر را تصحیح می کند.
از همین مسئله برای حرکت به جلو و عقب نیز استفاده می شود. با بالا بردن سرعت چرخش دو موتور عقبی به صورت هماهنگ ته کواد کوپتر بالا رفته و حرکت به سمت جلو اتفاق می افتد. کنترل جهت حرکت نیز دقیقا به همین روش و با درگیر کردن موتور های سوم و چهارم محقق می شود. البته چنین عملکردی مختص پهپاد های بسیار ساده بوده و در پهپاد های پیشرفته تر می توانیم حرکت موتور ها در جای خود در راستای محور افقی را نیز داشته باشیم.
ساخت کوادکوپتر
آیا هرکسی می تواند کواد کوپتر خود را بسازد؟ همانطور که در ابتدای این مقاله بیان کردیم، کواد کوپتر ها دارای پیچیدگی بسیار بالایی بوده و ساخت آنها نیاز به دانش تخصصی بسیار زیادی دارد.
با این حال با توجه به علاقه زیاد مردم به ساخت این دستگاه ها، ماژول های آماده ای در سطح بازار وجود داشته که با تهیه آن ها می توانید کواد کوپتر خود را بسازید. اگر بخواهید کمی تخصصی تر فعالیت کنید، می توانید بدنه کواد کوپتر خود را به صورت پرینت 3 بعدی تهیه کرده و پس از تهیه کردن موتور ها و پردازنده و دیگر قطعات مورد نیاز، کد لازم برای کنترل یک کواد کوپتر را از سطح اینترنت پیدا کرده و بر روی پردازنده خود آپلود کنید. لازم به ذکر است در مواقع بسیاری این کد ها ممکن است نیاز به اصلاح داشته باشند و یا با قطعات و موتور های شما همخوانی لازم را نداشته باشه و به همین جهت مجبور به بهینه سازی آن قطعه کد می شوید. برای همین کمی پیش زمینه در حیطه برق و برنامه نویسی آردوینو پیش نیاز ساخت یک کواد کوپتر به شمار می رود.
البته که شما همیشه می توانید کیت های آماده در سطح بازار را تهیه کرده و به صورت آماده و با یک سر هم کردن کواد کوپتر خود را داشته باشید. اما آیا جذابیتی هم در این کار وجود دارد؟
در ادامه برای علاقه مند کردن شما یک قطعه کد مخصوص برای کنترل کواد کوپتر در آردوینو آورده ام. امیدوارم با تلاش و وقت گذاشتن در این زمینه، لذتی که ساخت اولین پروژه سنگین برقی دارد را، تجربه کنید.
نرم افزار های مورد استفاده در طراحی پهپاد و کوادکوپتر
هر وسیله و یا دستگاهی که حرکت می کند و قابل کنترل است، حتماً از دو بخش مکانیکی و برق تشکیل شده است. در بخش مکانیک، بهترین نرم افزار برای طراحی سریع و مونتاژ قطعات Solidworks است. زیرا این امکان را به شما می دهد تا در سریع ترین زمان ممکن طراحی قطعات را انجام داده، آن ها را بر روی هم مونتاژ کرده و در ادامه نقشه های ساخت را چاپ کنید. solidworks همچنین به شما این امکان را می دهد تا مدل مونتاژی طراحی شده را از لحاظ برخورد بین قطعات و تداخلات احتمالی بررسی کرده و قبل از ساخت از اشکالات احتمالی جلوگیری نمایید. توصیه ما به شما استفاده از کامل ترین آموزش سالیدورک به زبان فارسی تولید شرکت مهندس یار است.
همچنین از آنجا که ساخت چنین وسیله ای یک پروژه نیمه کلان به شمار می رود، حتماً باید برای زمان بندی و کنترل پروژه از ابزار مخصوص آن که نرم افزار Microsoft Project است استفاده کنید. در رابطه با بحث کنترل پروژه نیز توصیه میکنیم حتماً از محصول جدید ما یعنی آموزش ms project 2021 مهندس یار دیدن فرمایید.


هیچ دیدگاهی نوشته نشده است.